Un equipo de investigadores del Centro de Automática y Robótica ha desarrollado una nueva arquitectura −innovadora, flexible y mantenible− de interfaz humano-máquina para la telemanipulación de robots en reactores de fusión
Los desarrollos en software avanzado, manipulación remota y robótica, realizados por investigadores del Centro de Automática y Robótica −CAR (UPM-CSIC)− y personal del grupo de empresas GTD, abordan el complejo desafío que representan las operaciones de manipulación remota en instalaciones de fusión con una vida útil operativa superior a los 30 años. Ante la diversidad y constante evolución de las interfaces hardware, surge una necesidad crítica de una arquitectura de software única, flexible y adaptable, fundamentada en experiencias previas y en una cuidadosa planificación para futuras actualizaciones. Esta es la base del desarrollo de MAMIC (Multiple Agent Managerial Intelligent Control), un modelo que proporciona una estrategia sólida para desarrollar software flexible, mantenible y comprobable.
El nuevo desarrollo forma parte del contrato entre GTD y Fusion for Energy (F4E) para el proyecto ITER (International Thermonuclear Experimental Reactor), en el cual participan conjuntamente la Unión Europea, Estados Unidos, Japón, China, India, Corea del Sur y Rusia. El objetivo final de este proyecto es "llevar el Sol a la Tierra" mediante la demostración de la viabilidad científica y tecnológica de la energía de fusión, la misma reacción nuclear que alimenta al sol, con el propósito de ofrecer una fuente de energía limpia e inagotable que contribuya a la conservación y preservación de nuestro planeta.
Al igual que otras instalaciones dedicadas a la investigación en fusión nuclear y física de plasmas, ITER enfrenta un desafío multidimensional en el mantenimiento de los sistemas ubicados dentro del edificio que alberga la vasija de contención. Dado que los niveles de radiación son extremadamente altos, los trabajos de mantenimiento dependerán en gran medida de la capacidad de manipulación remota. Para abordar este reto, es fundamental combinar ingeniería de alta precisión, robótica avanzada y tecnología de control remoto, asegurando la operatividad de estos sistemas durante toda la vida útil del proyecto, más de 30 años.
La operación y supervisión de estos complejos sistemas en entornos críticos requieren no solo un diseño robusto, sino también flexible y seguro a largo plazo. Esto ha llevado a la necesidad creciente de adoptar interfaces gráficas humano-máquina eficientes, impulsando la propuesta de una arquitectura innovadora: MAMIC. Este modelo garantiza una integración y compatibilidad perfectas de los sistemas con el operador de manera única, rápida y sencilla. Además, la necesidad de repetibilidad para la industrialización subraya la importancia de contar con un modelo estándar de referencia en lugar de construir cada implementación de manera personalizada.
MAMIC integra enfoques tradicionales, como el antropomórfico, la modelización predictiva y la arquitectura cognitiva, con métodos más contemporáneos, como la arquitectura hexagonal, para desarrollar sistemas más completos y eficaces. Este enfoque abarca de manera integral tanto los aspectos técnicos como los cognitivos y humanos.
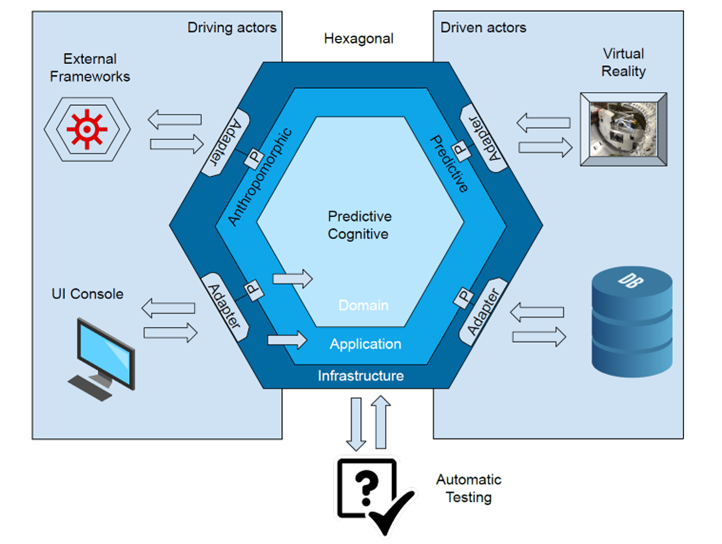
Generación e integración del modelo MAMIC. Enfoque antropomórfico (capa de aplicación): residen las interfaces de usuario y los componentes de interacción. Modelización predictiva (capa de aplicación y dominio): se encuentra la lógica empresarial y los componentes de procesamiento y análisis de datos. Arquitectura cognitiva (capa de dominio): se modelan y simulan los procesos cognitivos que se integran en la lógica empresarial para permitir un comportamiento similar al humano. Fuente Tamara Benito y Antonio Barrientos
Para validar la arquitectura MAMIC se aplicó a un caso de uso del Sistema de Mantenimiento Remoto de ITER, el cual debe ofrecer una capacidad integral de manipulación remota, incluyendo el rescate de material degradado, dentro del área interna del reactor.
Como comenta Tamara Benito, investigadora del CAR (UPM-CSIC) que ha participado en el trabajo, “como la generación del modelo ha sido validada con los requerimientos del ITER, la arquitectura MAMIC es perfectamente válida para cubrir las necesidades actuales y futuras de las instalaciones de esta gran infraestructura. Además, considerando las necesidades de manejo remoto de futuras instalaciones de fusión, se podría realizar una actualización del modelo incluyendo nuevos contextos acotados en la capa de dominio y nuevos puertos y adaptadores en las capas de aplicación e infraestructura.”
Referencia bibliográfica:
Tamara Benito y Antonio Barrientos. An Intelligent Human–Machine Interface Architecture for Long-Term Remote Robot Handling in Fusion Reactor Environments. Appl. Sci. 2024 , 14 (11), 4814; https://doi.org/10.3390/app14114814
